Accompagnement professeur H2-H3/E2
Manipulation 1 : "c'est quoi un servomoteur ?"
Pour trouver les positions extrêmes et la fonction liant largeur d'impulsion i et position angulaire θ.
Cette expérimentation permet de se familiariser avec un programme simple et lisible.
Courbe donnée par une loi de commande : i = a.θ + b
Pour notre servomoteur, on obtient :

fichier tableur Excel des essais sur le servomoteur HK15298...
Manipulation 2 : "loi de commande"
Pour compléter un programme qui demande l'angle voulu, qui calcule la largeur d'impulsion correspondante, l'affiche et qui positionne correctement le servomoteur. Un programme exemple est fourni, à modifier par les élèves.
programme Arduino corrigé pour le servomoteur HK15298...
Manipulation 3 : "vitesse à vide"
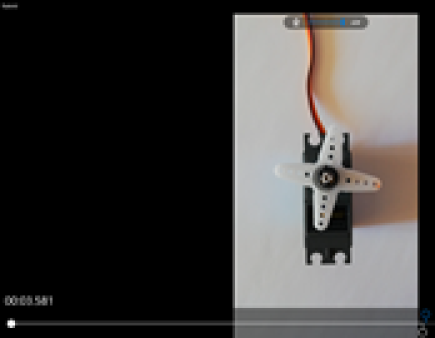
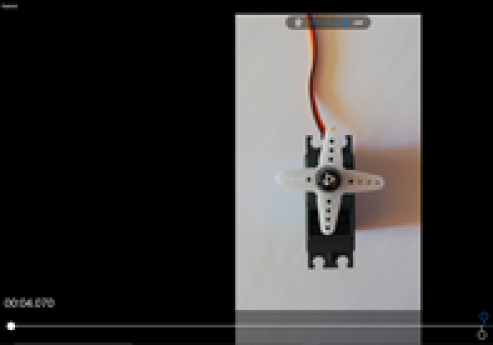
Pour mesurer la vitesse à vide du servomoteur. L'utilisation de la vidéo semble la plus appropriée avec un mode super ralenti pour quantifier le temps entre 2 positions (d'autres solutions logicielles gratuites existent telles que "Kinovea" ou "Tracker", payantes mais souvent présentes dans les laboratoires de sciences physiques comme par exemple "LatisPro").
|
| Soit 90° en 4,070-3,581=0,489s soit 30,6tr/min (sans charge !!) (Rq : au mieux, nous avons mesuré 48tr/min à vide) Et 0,326s pour 60° à vide, annoncé sur la doc technique à 0,13s pour 60° !! |
Le fichier vidéo joint peut être donné à l'élève lors de cette tâche...
fichier vidéo de l'expérimentation...