Gestion du capteur de force
Problématique
À partir des recherches et expérimentations réalisées précédemment (en H2-H3 et H4), vous devez créer le programme de traitement des signaux transmis par le capteur de force FSR402. Ce programme devra permettre de contrôler et commander le servomoteur en rotation. C'est à vous de définir les conditions limites qui piloteront le servomoteur.
Méthode :
Proposer un algorithme de programmation ou un algorigramme (organigramme de programmation) intégrant l'acquisition des signaux transmis du capteur et le contrôle du servomoteur.
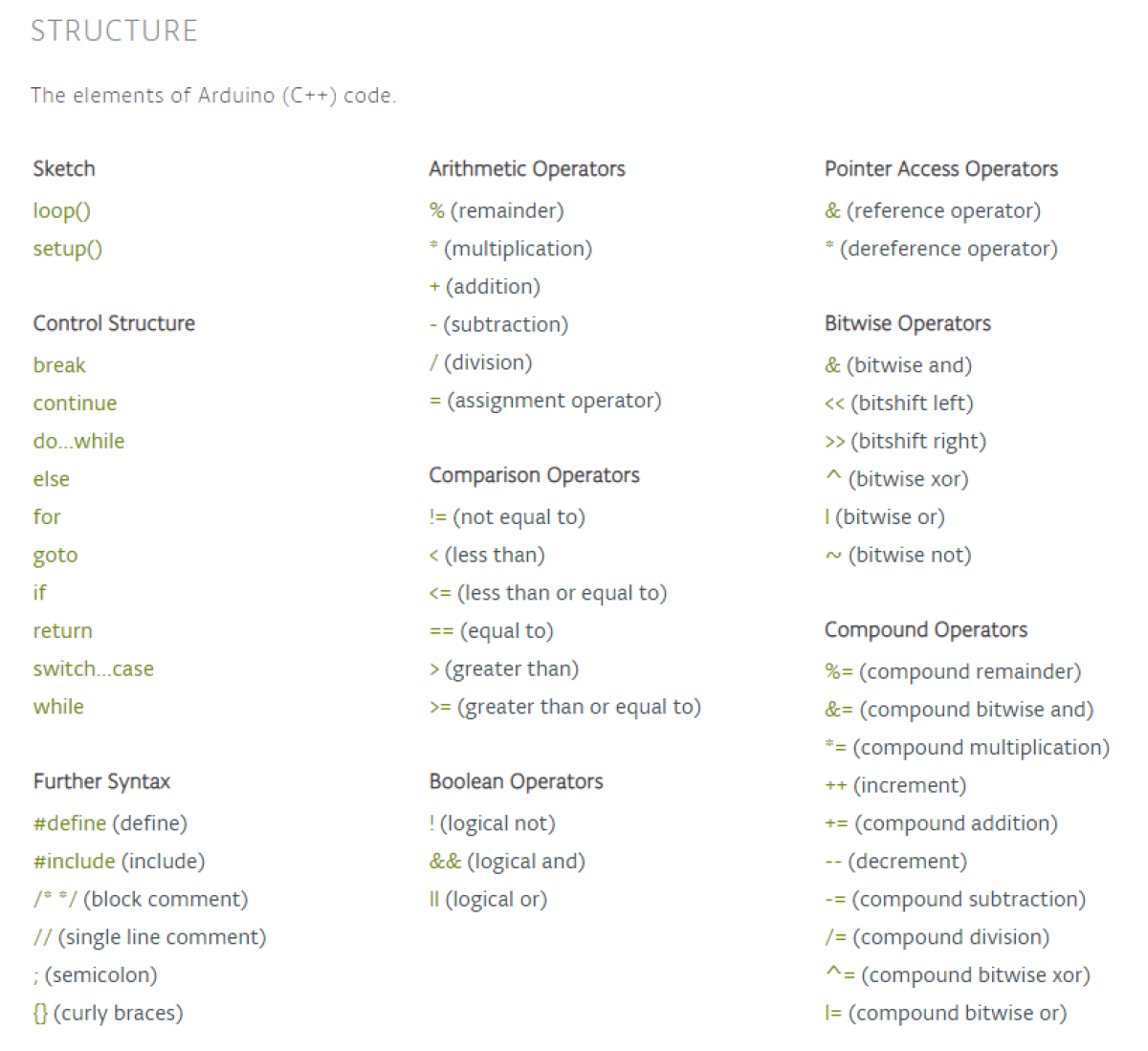
Rédiger et tester le code en langage C sur Arduino permettant de répondre à cette problématique.